
Quality Assessment-MCQ
Quality Assessment - MCQ on Robotics
Test your knowledge and understanding of robotics with our engaging multiple-choice quiz. This quiz includes a series of questions designed to assess your familiarity with key concepts related to robotic mechanics, joint types, kinematics, and more.
Topics covered in this quiz include:
- Prismatic joints
- Kinematic parameters
- Jacobian matrices
- Lagrangian mechanics
- Robot workspace and control methods
Prismatic Joints are used for ___ motion
Linear
Revolute
Cylindrical
Twisting
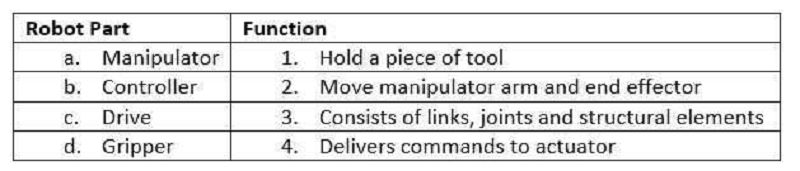
Match the following
A-3, b-4, c-2, d-1
A-1, b-4, c-2, d-3
A-3, b-2, c-4, d-3
A-4, b-3, c-2. d-1
In _____ robots, a human operator performs the task manually by leading the robot, which records the motions and repeats the same motions according to the recorded information.
Playback Robot
Fixed Sequence Robot
Variable Sequence Robot
Intelligent Robot
The square matrix that is used to represent both position and orientation in the same matrix is called a ___ matrix
Homogeneous Transformation
Normalized Transformation
Reference
Rotational Transformation
________ is based on the differentiation of the energy terms with respect to the system’s variables and time
Lagrangian Mechanics
Newtonian Mechanics
Denavit Hartenberg Representation
Jacobian Matrix
Which of the following is not a kinematic parameter
Link Offset
Joint offset
Joint angle
Link Length
Transformation from world space to joint space is called____ kinematics.
Inverse
Forward
Direct
Differential
The matrix represents a rotation about ___ axis by an angle θ
MCQ1
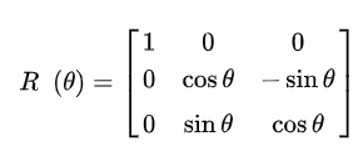
X
Y
Z
Normal
The smallest movement that can be made by a robot arm is called__
Resolution
Accuracy
Repeatability
Range
The relation between joint velocities and end effector velocities is specified by
Jacobian
Lagrangian
Newtonian
Homogeneos
35. The method in which the robot workspace is divided into discrete spaces is called__
Resolved Motion Rate Control
Sampled Motion Rate Control
Joint Space Singularity Control
Linear Control
Which of the following statements regarding Joint Space Singularity is not true ?
The Jacobian Matrix is of full rank at Joint Space Singularity
It is the point at which the Jacobian loses its rank.
The Jacobian is not invertible at Joint Space singularity
At Joint Space singularity, manipulator dexterity is zero.
The Lagrangian is defined as
KE - PE
PE - KE
PE/KE
PE+KE
A time based control sequence moving the manipulator from initial configuration to destination
Trajectory Generation
Path Planning
Resolved Motion
Dynamic Sequence
{"name":"Quality Assessment-MCQ", "url":"https://www.quiz-maker.com/QPREVIEW","txt":"Test your knowledge and understanding of robotics with our engaging multiple-choice quiz. This quiz includes a series of questions designed to assess your familiarity with key concepts related to robotic mechanics, joint types, kinematics, and more.Topics covered in this quiz include:Prismatic jointsKinematic parametersJacobian matricesLagrangian mechanicsRobot workspace and control methods","img":"https:/images/course7.png"}